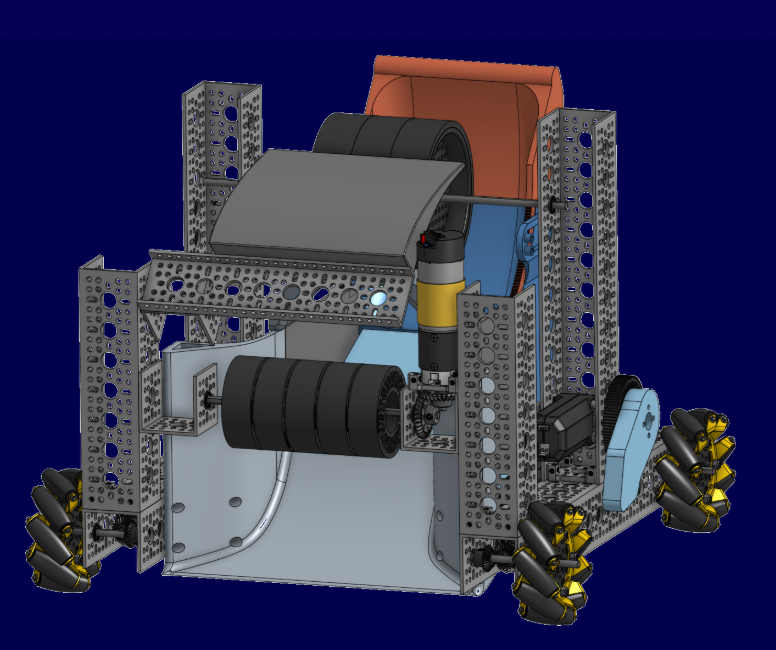
DRIVETRAIN
Motors are connected inline with high torque miter gears, allowing for an ultra-compact and modular drivetrain with ample space for internals. Features an inline odometry system with dead-wheels for precise position tracking.
Detailed specifications and design philosophy of our current competition robot.
Motors are connected inline with high torque miter gears, allowing for an ultra-compact and modular drivetrain with ample space for internals. Features an inline odometry system with dead-wheels for precise position tracking.
A dedicated shield plate prevents artifacts from landing inside the robot, while the integrated camera system enables advanced vision processing.
Built with a 3D printed ramp and a row of 60mm Gecko wheels. Intakes artifacts very quickly through a large opening, allowing us to return to scoring faster.
Uses a curved ramp on the inside to naturally move artifacts using gravity into the shooting position. A 100% reliable and passive design that reduces complexity.
Lifts up to push artifacts into the flywheel. Engineered to allow for single, double, or triple fast shots.
Large 120mm wheels maintain angular momentum for rapid 3-artifact shots. The hood is controlled by two synced servos for precision (±15 degrees) and speed.